This
chapter will introduce the particle swarm optimization (PSO) algorithm
giving an overview of it. In order to formally present the mathematical
formulation of PSO algorithm, the classical version will be used, that
is, the inertial version; meanwhile, PSO variants will be summarized.
Besides that, hybrid methods representing a combination of heuristic and
deterministic optimization methods are going to be presented as well.
Before the presentation of these algorithms, the reader will be
introduced to the main challenges when approaching PSO algorithm. Two
study cases of diverse nature, one regarding the PSO in its classical
version and another one regarding the hybrid version, are provided in
this chapter showing how handful and versatile it is to work with PSO.
The former case is the optimization of a mechanical structure in the
nuclear fuel bundle and the last case is the optimization of the cost
function of a cogeneration system using PSO in a hybrid optimization.
Finally, a conclusion is presented.
Maximizing
earns or minimizing losses has always been a concern in engineering
problems. For diverse fields of knowledge, the complexity of
optimization problems increases as science and technology develop.
Often, examples of engineering problems that might require an
optimization approach are in energy conversion and distribution, in
mechanical design, in logistics, and in the reload of nuclear reactors.
To
maximize or minimize a function in order to find the optimum, there are
several approaches that one could perform. In spite of a wide range of
optimization algorithms that could be used, there is not a main one that
is considered to be the best for any case. One optimization method that
is suitable for a problem might not be so for another one; it depends
on several features, for example, whether the function is differentiable
and its concavity (convex or concave). In order to solve a problem, one
must understand different optimization methods so this person is able
to select the algorithm that best fits on the features’ problem.
The particle swarm optimization (PSO) algorithm, proposed by Kennedy and Eberhart [1],
is a metaheuristic algorithm based on the concept of swarm intelligence
capable of solving complex mathematics problems existing in engineering
[2].
It is of great importance noting that dealing with PSO has some
advantages when compared with other optimization algorithms, once it has
fewer parameters to adjust, and the ones that must be set are widely
discussed in the literature [3].
2. Particle swarm optimization: an overview
In
the early of 1990s, several studies regarding the social behavior of
animal groups were developed. These studies showed that some animals
belonging to a certain group, that is, birds and fishes, are able to
share information among their group , and such capability confers these
animals a great survival advantage [4]. Inspired by these works, Kennedy and Eberhart proposed in 1995 the PSO algorithm [1],
a metaheuristic algorithm that is appropriate to optimize nonlinear
continuous functions. The author derived the algorithm inspired by the
concept of swarm intelligence, often seen in animal groups, such as
flocks and shoals.
In order to explain how the PSO had
inspired the formulation of an optimization algorithm to solve complex
mathematical problems, a discussion on the behavior of a flock is
presented. A swarm of birds flying over a place must find a point to
land and, in this case, the definition of which point the whole swarm
should land is a complex problem, since it depends on several issues,
that is, maximizing the availability of food and minimizing the risk of
existence of predators. In this context, one can understand the movement
of the birds as a choreography; the birds synchronically move for a
period until the best place to land is defined and all the flock lands
at once.
In the given example, the movement of the flock
only happens as described once all the swarm members are able to share
information among themselves; otherwise, each animal would most likely
land at a different point and at a different time. The studies regarding
the social behavior of animals from the early 1990s stated before in
this text pointed out that all birds of a swarm searching for a good
point to land are able to know the best point until it is found by one
of the swarm’s members. By means of that, each member of the swarm
balances its individual and its swarm knowledge experience, known as
social knowledge. One may notice that the criteria to assess whether a
point is good or not in this case is the survival conditions found at a
possible landing point, such as those mentioned earlier in this text.
The
problem to find the best point to land described features an
optimization problem. The flock must identify the best point, for
example, the latitude and the longitude, in order to maximize the
survival conditions of its members. To do so, each bird flies searching
and assessing different points using several surviving criteria at the
same time. Each one of those has the advantage to know where the best
location point is found until known by the whole swarm.
Kennedy
and Eberhart inspired by the social behavior of birds, which grants
them great surviving advantages when solving the problem of finding a
safe point to land, proposed an algorithm called PSO that could mimic
this behavior. The inertial version, also known as classical version, of
the algorithm was proposed in 1995 [1].
Since then, other versions have been proposed as variations of the
classical formulation, that is, the linear-decreasing inertia weight [5], the constriction factor weight [6], the dynamic inertia and maximum velocity reduction, also in Ref. [6], besides hybrid models [7] or even quantum inspired approach optimization techniques that can be applied to PSO [8].
This chapter will only present the inertial model of PSO, as it is the
state-of-the-art algorithm, and to understand better the derivations of
PSO, one should firstly understand its classical version.
The goal of an optimization problem is to determine a variable represented by a vector X=x1x2x3…xn" role="presentation">X=[x1x2x3…xn]
that minimizes or maximizes depending on the proposed optimization formulation of the function fX" role="presentation">f(X). The variable vector X" role="presentation">X is known as position vector; this vector represents a variable model and it is n" role="presentation">n dimensions vector, where n" role="presentation">n
represents the number of variables that may be determined in a problem,
that is, the latitude and the longitude in the problem of determining a
point to land by a flock. On the other hand, the function fX" role="presentation">f(X) is called fitness function or objective function, which is a function that may assess how good or bad a position X" role="presentation">X
is, that is, how good a certain landing point a bird thinks it is after
this animal finds it, and such evaluation in this case is performed
through several survival criteria.
Considering a swarm with P particles, there is a position vector Xit=xi1xi2xi3…xinT" role="presentation">Xti=(xi1xi2xi3…xin)T
and a velocity vector Vit=vi1vi2vi3…vinT" role="presentation">Vti=(vi1vi2vi3…vin)T
at a t iteration for each one of the i particle that composes it. These vectors are updated through the dimension j according to the following equations:
Eq. (1)
denotes that there are three different contributions to a particle’s
movement in an iteration, so there are three terms in it that are going
to be further discussed. Meanwhile, Eq. (2) updates the particle’s positions. The parameter w" role="presentation">w
is the inertia weight constant, and for the classical PSO version, it
is a positive constant value. This parameter is important for balancing
the global search, also known as exploration (when higher values are
set), and local search, known as exploitation (when lower values are
set). In terms of this parameter, one may notice that it is one of the
main differences between classical version of PSO and other versions
derived from it.
Velocity update equation’s first term is
a product between parameter w and particle’s previous velocity, which
is the reason it denotes a particles’ previous motion into the current
one. Hence, for example, if w=1" role="presentation">w=1
,
the particle’s motion is fully influenced by its previous motion, so
the particle may keep going in the same direction. On the other hand, if
0≤w<1" role="presentation">0≤w<1
,
such influence is reduced, which means that a particle rather goes to
other regions in the search domain. Therefore, as the inertia weight
parameter is reduced, the swarm may explore more areas in the searching
domain, which means that the chances of finding a global optimum may
increase. However, there is a price when using lower w values, which is
the simulations turn out to be more time consuming [1].
The individual cognition term, which is the second term of Eq. (1), is calculated by means of the difference between the particle’s own best position, for example, pbestij" role="presentation">pbestij
, and its current position Xijt" role="presentation">Xtij. One may notice that the idea behind this term is that as the particle gets more distant from the pbestij" role="presentation">pbestij position, the difference pbestij−Xijt" role="presentation">(pbestij−Xtij) must increase; therefore, this term increases, attracting the particle to its best own position. The parameter c1" role="presentation">c1
existing as a product in this term is a positive constant and it is an
individual-cognition parameter, and it weighs the importance of
particle’s own previous experiences. The other parameter that composes
the product of second term is r1" role="presentation">r1, and this is a random value parameter with 01" role="presentation">[0,1]
range. This random parameter plays an important role, as it avoids
premature convergences, increasing the most likely global optima [1].
Finally,
the third term is the social learning one. Because of it, all particles
in the swarm are able to share the information of the best point
achieved regardless of which particle had found it, for example, gbestj" role="presentation">gbestj
. Its format is just like the second term, the one regarding the individual learning. Thus, the difference gbestj−Xijt" role="presentation">(gbestj−Xtij) acts as an attraction for the particles to the best point until found at some t" role="presentation">t iteration. Similarly, c2" role="presentation">c2 is a social learning parameter, and it weighs the importance of the global learning of the swarm. And r2" role="presentation">r2 plays exactly the same role as r1" role="presentation">r1
.
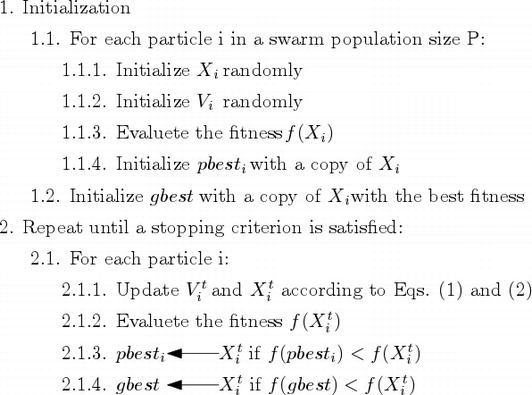
Lastly, Figure 1
shows the PSO algorithm flowchart, and one may notice that the
optimization logic in it searches for minimums and all position vectors
are assessed by the function fX" role="presentation">f(X)
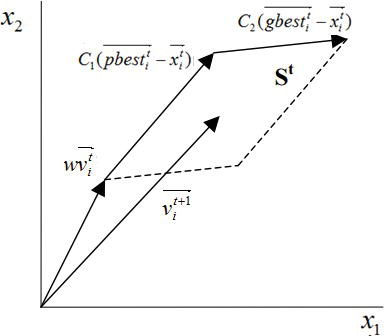
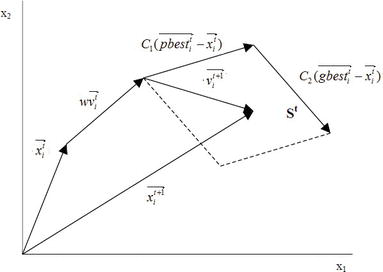
, known as fitness function. Besides that, Figures 2 and 3 present the update in a particle’s velocity and in its position at a t" role="presentation">t iteration, regarding a bi-dimensional problem with variables x1" role="presentation">x1 and x2" role="presentation">x2
.
Figure 1.
The PSO algorithm.
Figure 2.
The velocity vector at a t iteration as being composed by two components regarding a bi-dimensional problem.
Figure 3.
The position vector being updated at a t iteration as being composed by two components regarding a bi-dimensional problem.
3. Hybrid methods: coupling PSO with deterministic methods
In
general, optimization methods are divided into deterministic and
heuristic. Deterministic methods aim to establish an iterative process
involving a gradient, which, after a certain number of iterations, will
converge to the minimum of the objective function. The iterative
procedure of this type of method can be written as follows:
xk+1=xk+αkdk" role="presentation">xk+1=xk+αkdk
E3
where x" role="presentation">x
is the variable vector, α" role="presentation">α is the step size, d" role="presentation">d is the descent direction, and k" role="presentation">k
is the iteration number. The best that can be expected from any
deterministic gradient method is its convergence to a stationary point,
usually a local minimum.
Heuristic methods, in contrast
to deterministic methods, do not use the objective function gradient as a
downward direction. Its goal is to mimic nature in order to find the
minimum or maximum of the objective function by selecting, in an elegant
and organized manner, the points where such a function will be
calculated [9].
Hybrid
methods represent a combination of deterministic and heuristic methods
in order to take advantage of both approaches. Hybrid methods typically
use a heuristic method to locate the most likely region where the global
minimum is. Once this region is determined, the hybrid formulation
algorithm switches to a deterministic method to get closer and faster to
the minimum point. Usually, the most common approach used for this
formulation is using the heuristic method to generate good candidates
for an optimal solution and then using the best point found as a start
point for the deterministic methods in order to converge to local
minimums.
Numerous papers have been published over the last few years showing the efficiency and effectiveness of hybrid formulations [10, 11, 12]. There are also a growing number of publications over the last decade regarding hybrid formulations for optimization [13].
In
this context, PSO algorithm can be combined with deterministic methods,
increasing the chance of finding the function’s most likely global
optimal. This chapter presents the three deterministic methods in which
the PSO was coupled: conjugate gradient method, Newton’s method, and
quasi-Newton method (BFGS). The formulation of each one of those is
briefly presented in the following sections.
3.1 Conjugate gradient
The
conjugate gradient method improves the convergence rate of the steepest
descent method by choosing descending directions that are a linear
combination of the gradient direction with the descending directions of
previous iterations. Therefore, their equations are:
is the conjugation coefficient that acts by adjusting the size of the
vectors. In the Fletcher-Reeves version, the conjugation coefficient is
given by:
While
the steepest descent and conjugate gradient methods use first
derivative information, Newton’s method also uses second derivative
information to accelerate the convergence of the iterative process. The
algorithm used in this method is presented below:
is the Hessian of the function. In general, this method requires few
iterations to converge; however, it requires a matrix that grows with
the size of the problem. If the estimate is far from the minimum, the
Hessian matrix may be poorly conditioned. In addition, it involves
inverting a matrix, which makes the method even more computationally
expensive.
3.3 Quasi-Newton (BFGS)
BFGS
is a type of quasi-Newton method. It seeks to approximate the inverse
of the Hessian using the function’s gradient information. This
approximation is such that it does not involve second derivatives. Thus,
this method has a slower convergence rate than Newton’s methods,
although it is computationally faster. The algorithm is presented below:
PSO
can be applied to many types of problems in the most diverse areas of
science. As an example, PSO has been used in healthcare in diagnosing
problems of a type of leukemia through microscopic imaging [14].
In the economic sciences, PSO has been used to test restricted and
unrestricted risk investment portfolios to achieve optimal risk
portfolios [15].
In
the engineering field, the applications are as diverse as possible.
Optimization problems involving PSO can be found in the literature in
order to increase the heat transfer of systems [16] or even in algorithms to predict the heat transfer coefficient [17].
In the field of thermodynamics, one can find papers involving the
optimization of thermal systems such as diesel engine–organic Rankine
cycle [18], hybrid diesel-ORC/photovoltaic system [19], and integrated solar combined cycle power plants (ISCCs) [20].
PSO
has also been used for geometric optimization problems in order to find
the best system configurations that best fit the design constraints. In
this context, we can mention studies involving optical-geometric
optimization of solar concentrators [21] and geometric optimization of radiative enclosures that satisfy temperature distribution and heat flow [22].
After
having numerous versions of PSO algorithm such as those mentioned in
the first section, PSO is able to deal with a broad range of problems,
from problems with a few numbers of goals and continuum variables to
others with challenging multipurpose problems with many discreet and/or
continuum variables. Besides its potential, the user must be aware that
the PSO will only achieve appreciated results if one implements an
objective function capable of reflecting all goals at once. To derive
such a function may be a challenging task that should require a good
understanding of the physical problem to be solved and the ability to
abstract ideas into a mathematical equation as well. The problems
presented in the fourth section of this work provide examples of
objective functions capable of playing this role.
Another
challenge for one using PSO is how to handle the bounds of the search
domain whenever a particle moves beyond it. Many popular strategies that
had already been proposed are reviewed and compared for PSO classical
version in [23].
Those strategies may be reviewed and understood by PSO users so this
person can pick up the one that best fits the optimization problem
features.
5. Engineering problems
In
this chapter, two engineering problems will be described, one involving
the fuel element of a nuclear power plant and the other involving a
thermal cogeneration system. In the first problem, the traditional PSO
formulation is used to find the optimal fuel element spacing. In the
second problem, hybrid optimization algorithms are used to find the
operating condition that minimizes total cost of operation of a
cogeneration system.
5.1 Springs and dimples of a nuclear fuel bundle spacer grid
In [24],
the authors perform the optimization of dimples and spring geometries
existing in the nuclear fuel bundle (FB) spacer grid (SG). An FB is a
structured group of fuel rods (FRs), and it is also known as fuel
assembly, and on the other hand, an FR is a long, slender, zirconium
metal tube containing pellets of fissionable material, which provide
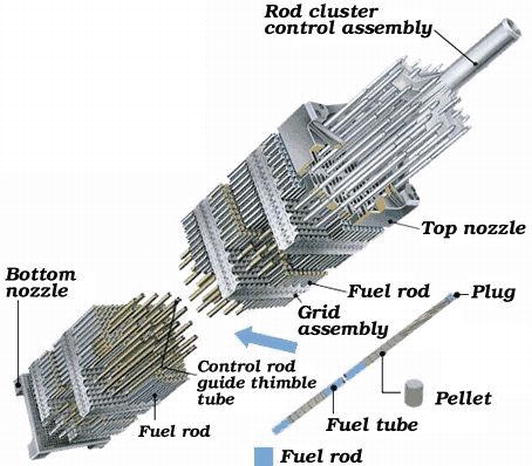
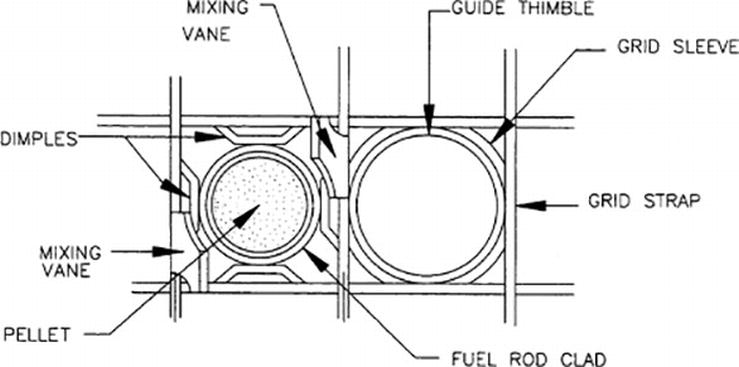
fuel for nuclear reactors [25]. An SG is a part of the nuclear fuel bundle and, Figure 4
shows a schematic view of a nuclear FB; it is possible to see in this
illustration how the FRs and the SGs are assembled together. In
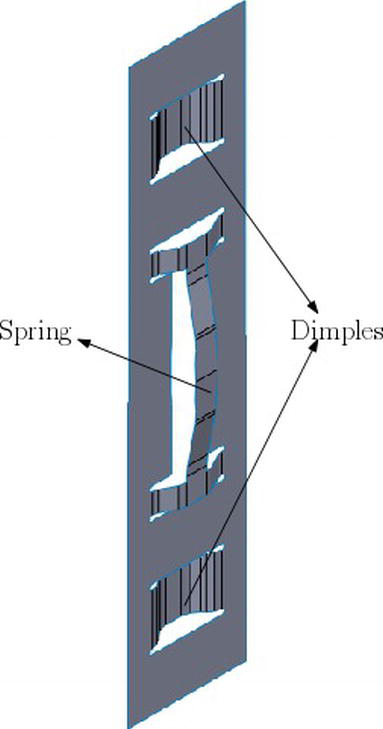
addition, Figure 5 gives more details on how an SG’s springs and dimples grip an FR, and Figure 6
shows exactly what parts in the SG are the springs and the dimples that
may be in contact with an FR. For this work, the PSO algorithm had been
developed in MATLAB® (MathWorks Inc.); meanwhile, the mechanical
calculations were performed with finite element analysis (FEA), using
ANSYS 15.0 software.
Figure 4.
A schematic view of a nuclear fuel bundle.
Figure 5.
The top view of a spacer grid gripping an FR through its dimples and springs.
Figure 6.
A part of an SG strip with one spring and two dimples.
The
springs and the dimples act as supports required having special
features once an FR releases a great amount of energy, caused by the
nuclear reactions occurring within it. Hence, the material of an FR must
face a broad range of temperatures when in operation; for example,
around a variation of 300°C, this fact is an important matter for the
springs and the dimples as those must not impose an excessive gripping
force on the rod, allowing it some axial thermal expansion. On the other
hand, the upward water flow cooling the great amount of heat released
by fission occurring within the rod creates a flow-induced vibration, so
the springs and dimples must also limit the lateral displacement of the
fuel rods. Besides that, the SG may also support the FRs through its
dimples and springs at many loading conditions, that is, earthquakes and
shipping and handling. To support safely the fuel in a nuclear reactor
is an important matter during operation, and consequences such as the
release of fission products from a fuel rod and a reactor safety
shutdown could happen because of a poor design.
Finally,
one can understand that as the springs and the dimples of an FB must
have a geometry able to comply with conflicting requirements so the FRs
remain laterally restrained, avoiding it from bowing and vibrating [26], using an optimization algorithm could be useful.
Jourdan et al. [13]
had performed the optimization of the dimples and springs of an FB’s SG
using PSO classical version algorithm. The authors chose some geometry
variables that should be important to features such as the gripping
stiffness and the stress distribution in the spacer grid, which are the
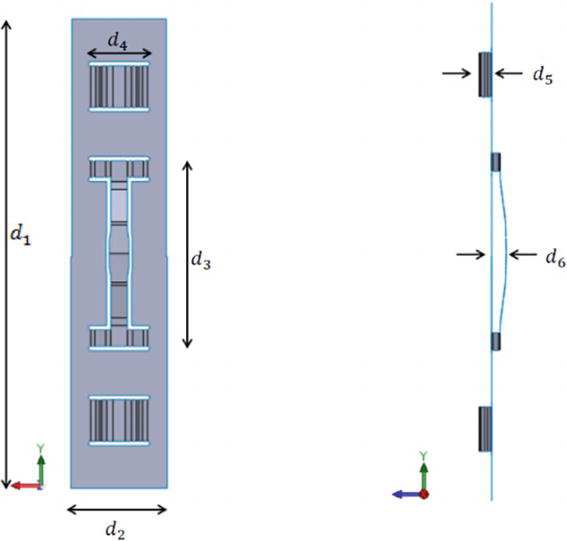
optimization goals in their work. Thus, the position vector is written
as Xit=di1di2di3di4di5di6T" role="presentation">Xti=(di1,di2,di3,di4,di5,di6)T
, and these lengths are those in Figure 7, while Table 1 shows the range of such variables, that is, the search domain of the problem.
Figure 7.
Variable lengths that should feature the goals of the optimization.
Variable
Lower bound (mm)
Upper bound (mm)
d1" role="presentation">d1
50
70
d2" role="presentation">d2
10
15
d3" role="presentation">d3
5
30
d4" role="presentation">d4
5
10
d5" role="presentation">d5
1
5
d6" role="presentation">d6
1
5
Table 1.
Variable boundaries for the SG optimization.
In PSO simulations from Ref. [24], for each position vector Xit" role="presentation">Xti
,
there is an FEA model with the geometry variable values of its related
vector. In such FEA model, there are boundary conditions of an elastic
static analysis. The boundary conditions considered in these simulations
regard one spring and two dimples gripping two FRs, one in contact with
the spring and the other one in contact with two dimples. Contacts were
not modeled actually in order to simplify the model, and those were
replaced by displacements similar to the condition of an FR with the
diameter of 9.7 mm being gripped in the available space considering the Xit" role="presentation">Xti
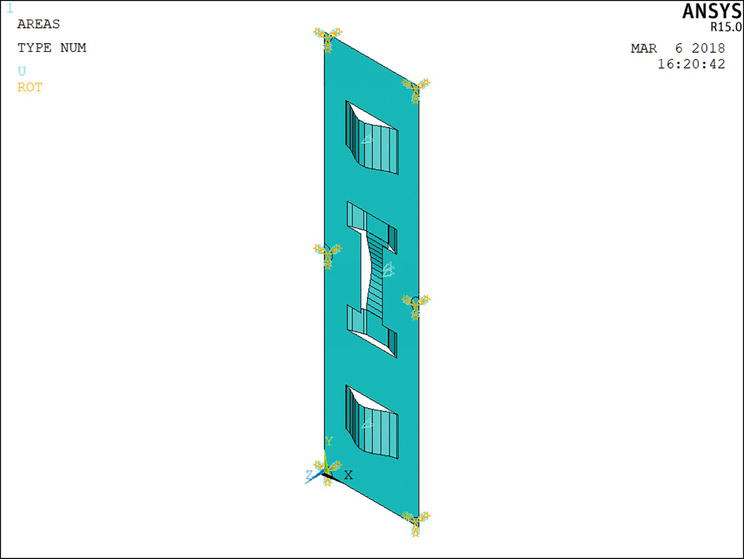
geometry. Other boundary conditions are also the restriction of translations and rotations on the welding nodes. Figure 8 presents these boundary conditions regarding any position vector. All simulations were built using SHELL181 finite element [27], considering the material to be the Inconel 718.
Figure 8.
Model’s boundary condition considering any position vector.
The goals of the optimization performed in [24]
are three: first, to minimize the stress intensity (SI) within the
structure; second, to create an SG geometry featuring a gripping
stiffness value as close as possible to some Kreference" role="presentation">Kreference
;
and finally, to find a geometry that allows some axial thermal
expiation by the FR. These three features are the main mechanical design
requirements for an SG [26].
A simulation considering a population of P=100" role="presentation">P=100
particles in a swarm and an inertial weight of w=0.3" role="presentation">w=0.3
was performed in [26].
In order to obtain good results from PSO simulations, in other words,
to determine the variable values that might fit on actual desired
features, one must derive a fitness function able to properly grade all
the optimization goals at once, without privileging none of the goals
comparing to all others.
It should be noted that the
grades assessed by the fitness function could be in an increasing scale
or in a decreasing one, depending on the conception of the PSO
algorithm. In [26],
the authors chose to perform the search at a decreasing scale, and then
the fitness function, Eq. (15), was designed to be minimized.
The
fitness function implemented assesses three different terms through two
conditions. The two conditions regard the fact that the SG must allow
some axial thermal expansion by the FR. To do so, a parameter displacement" role="presentation">displacement
is created, and it measures the space that an FR with 9.7 mm diameter
will use when gripped by an SG with some position vector geometry. Thus,
a geometry producing a displacement" role="presentation">displacement
over 0.4 mm will receive a high grade, meaning that this is an
undesired feature, as the algorithm performs its optimization at a
decreasing scale. The value of 0.4 mm is considered to be a good value
for the design of an SG [28, 29, 30, 31].
The σ" role="presentation">σ
parameter represents the SI, and then it is easy to understand that as
the SI gets lower this term also does, which is desirable. Finally, the
term ckkcalculated−kreference" role="presentation">ck(kcalculated−kreference) plays the role of finding a geometry that its stiffness, that is, kcalculated" role="presentation">kcalculated, gets as close as possible to a reference stiffness kreference" role="presentation">kreference, where this last parameter is set to be 27.2 N/mm [31]. Meanwhile, the parameter ck" role="presentation">ck
is a coefficient that must be set in order to fit the order of
magnitude between the fitness function’s terms, so none of them gets
greater importance. In [24], ck" role="presentation">ck
parameter had been calibrated by performing several PSO simulations,
and then, this value was set to be 60. One should notice that the
fitness function does not require a unit consistency, as its value is
only a mathematical abstraction.
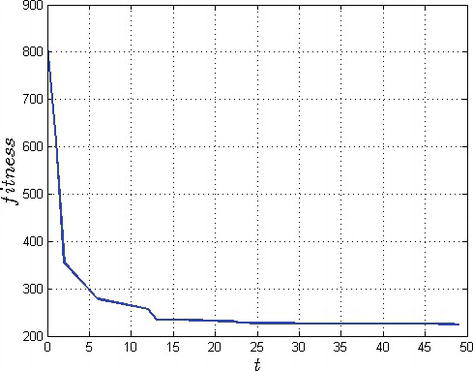
Figure 9
shows the fitness improvement performed to optimize the geometry of an
SG’s dimples and spring. This simulation resulted in an optimized
geometry with an SI of 196 MPa and a gripping stiffness of 27.2 N/mm.
Figure 9.
Fitness improvements from simulation performed in [24].
In [31],
the authors performed an FEA and a real experiment to measure the SI
and the gripping stiffness of the Chashma Nuclear Power Plant Unit 1’s
(CHASNUPP-1’s) SG spring under the same conditions as considered in [24]. The results from [31]
regarding a real SG that is in operation at CHASNUPP-1, which might not
have been optimized, are 27.2 N/mm for the gripping stiffness and
816 MPa for the SI; meanwhile, the optimized result found in [24]
has the same gripping stiffness although with an SI over 75% lower than
CHASNUPP-1’s SG. Thus, when comparing the results of the most likely
optimal found using the PSO algorithm with those from a real SG [31], one can conclude that PSO had played its role well to design the component under study.
5.2 Cost of a cogeneration system
The
second problem involves minimizing the function that represents the
total cost of operation of a cogeneration system called CGAM. It is
named after its creators (C. Frangopoulos, G. Tsatsaronis, A. Valero,
and M. von Spakovsky) who decided to use the same system to compare the
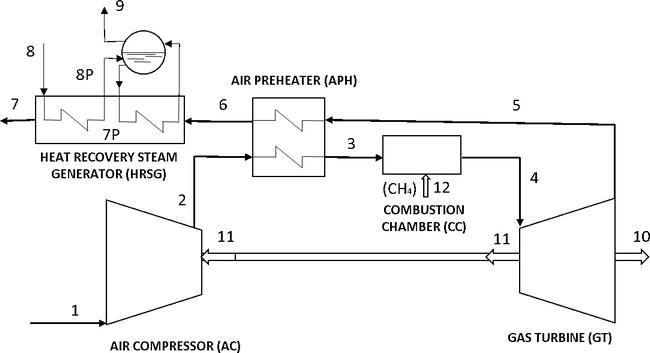
solution of the optimization problem with different methodologies [13]. Figure 10 indicates the system.
Figure 10.
CGAM system.
The
CGAM system is a cogeneration system consisting of an air compressor
(AC), a combustion chamber (CC), a gas turbine (GT), an air preheater
(APH), and a heat recovery steam generator (HRSG), which consists of an
economizer for preheating water and an evaporator. The purpose of the
cycle is the generation of 30 MW of electricity and 14 kg/s of saturated
steam at a pressure of 20 bar.
The economic description
of the system used in the present work is the same as the one adopted in
the original work and considers the annual fuel cost and the annual
cost associated with the acquisition and operation of each equipment.
More details can be found in [32]. The equations for each component are presented below:
CRF is the capital recovery factor (18.2%), N is the number of annual plant-operating hours (8000 h), and φ is a maintenance factor (1.06). In addition, cf" role="presentation">cf
is the fuel cost per unit of energy (0.004 $/MJ). Table 2 indicates the cost constants adopted for each component. The following equation represents the total cost of operation rate:
In order to perform the optimization of Eq. (22), the five decision variables adopted in the definition of the original problem are considered: the compression ratio (P2/P1" role="presentation">P2/P1
), the isentropic efficiency of the compressor (ηCA" role="presentation">ηCA), the isentropic efficiency of the turbine (ηGT" role="presentation">ηGT), the air temperature at the preheater outlet (T3" role="presentation">T3), and the fuel gas temperature at the turbine inlet (T4" role="presentation">T4
).
To optimize the objective function, three optimization routines
coupling PSO with different deterministic methods were used as indicated
in Table 3.
Heuristic
Deterministic
Hybrid 1
Particle swarm
Conjugate gradient
Hybrid 2
Particle swarm
Quasi-Newton
Hybrid 3
Particle swarm
Newton
Table 3.
Hybrid methods.
To
solve the thermodynamic equations of the problem, the professional
process simulator IPSEpro® version 6.0 was adopted. IPSEpro® is a
process simulator used to model and simulate different thermal systems
through their thermodynamic equations. This program was developed by
SimTech and has a user-friendly interface, as well as a library with a
wide variety of components, allowing the user to model and simulate
conventional plants, cogeneration systems, cooling cycles, combined
cycles, and more. The optimization method routines were written in
MATLAB® (MathWorks Inc.), and the algorithm was integrated with IPSEpro® in order to solve the thermodynamic problem and perform the optimization.
To perform the optimization, the limits for the problem variables were established, as indicated in Table 4 [33].
Limits
7 ≤ P2/P1" role="presentation">P2/P1
≤ 27
0.7 ≤ ηCA" role="presentation">ηCA
≤ 0.9
0.7 ≤ ηGT" role="presentation">ηGT
≤ 0.9
700 K ≤ T3" role="presentation">T3
≤ 1100 K
1100 K ≤ T4" role="presentation">T4
≤ 1500 K
Table 4.
Variable limits.
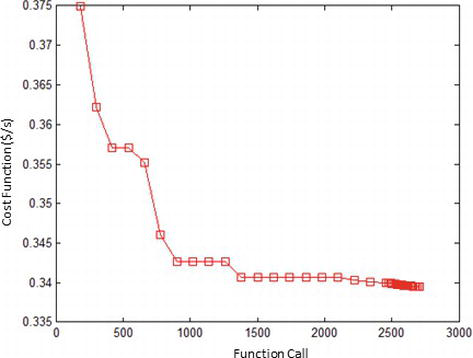
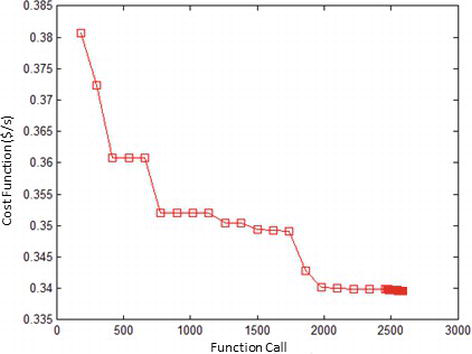
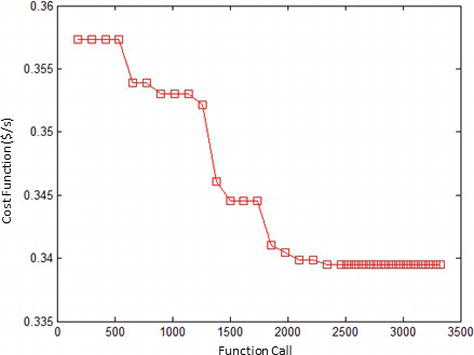
Table 5 presents the results found for the variables in each method and the value of the objective function. Figures 11–13 present the graphs of the evolution of the cost function in relation to the function call for the performed optimizations.
Hybrid 1
Hybrid 2
Hybrid 3
P2/P1
9.46
9.04
8.29
ηCA
0.83
0.83
0.85
T3
600.43
612.53
606.47
ηGT
0.88
0.88
0.88
T4
1210.95
1212.67
1214.65
Cost function ($/s)
0.33948
0.33953
0.33949
Table 5.
Optimization results.
Figure 11.
Hybrid 1 optimization.
Figure 12.
Hybrid 2 optimization.
Figure 13.
Hybrid 3 optimization.
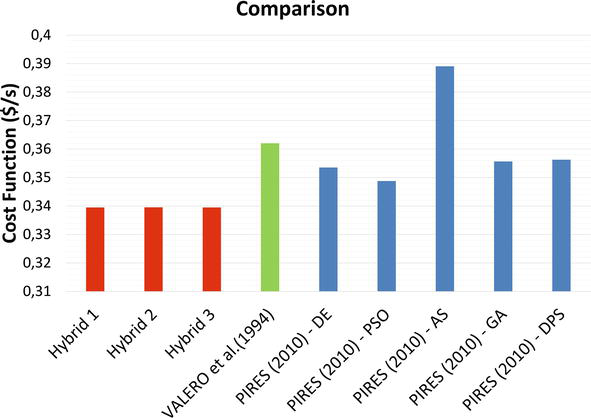
In
order to evaluate the algorithm’s efficiency, a comparison was made
between the results obtained in the present work and those obtained by [32, 33]. It is worth mentioning that the thermodynamic formulation used by [32]
is slightly different from that constructed in the simulator;
therefore, some differences in the final value of the objective function
were already expected. In [33],
the CGAM system was also built in IPSEpro® and the optimization was
performed in MATLAB® using the following optimization methods:
differential evolution (DE), particle swarm (PSO), simulated annealing
(SA), genetic algorithm (GA), and direct pattern search (DPS). A
comparison between the results is presented in Figure 14.
Figure 14.
Comparison between the results obtained and bibliographic references.
It
is possible to verify that the hybrid methods used in this work have
excellent performance, and the values found are compatible with the
other references. This result consolidated the use of hybrid
formulations used to optimize the objective function of the problem.
6. Conclusions
In
the present work, it was possible to present the basic fundamentals
involving the PSO method. The advantages and disadvantages of the method
were discussed, as well as interpretations were provided to its
algorithm. It was also possible to discuss about hybrid methods that
combine deterministic and heuristic methods in order to extract the
advantages of each one.
As discussed earlier, it is
impracticable to say that the result obtained by an optimization method
such as PSO is the global maximum or minimum, so some authors call the
results as the most likely optimal global. Thus, some strategies can be
employed in order to verify the validity of the optimal results
obtained. One of the strategies is to compare with the results obtained
by other optimization algorithms, as used in the present work. In the
absence of optimal data available, due to either computational
limitations or even lack of results of the subject, it is possible to
use as strategy the comparison of information from real physical models,
that is, that were not obtained through optimization algorithms, but
instead good engineering practice and judgment gained through technical
experience.
In addition, it was possible to apply the PSO
algorithm to different engineering problems. The first involves the
spacer grid of the fuel element and the second involves the optimization
of the cost function of a cogeneration system. In both problems,
satisfactory results were obtained demonstrating the efficiency of the
PSO method.